How much do you know about the obstacle avoidance methods of mobile robots?
Mobile robots are an important research field for robots, and people have begun research on mobile robots very early.
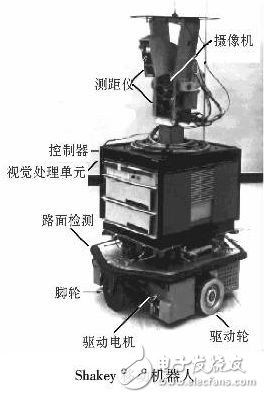
The world's first truly mobile robot was developed by Stanford Research Institute (SRI)'s Artificial Intelligence Center from 1966 to 1972. It is called Shakey. It is equipped with a TV camera, a triangometer, a collision sensor, and a drive. The motor and encoder are controlled by two computers via a wireless communication system for simple autonomous navigation. Shakey's development process also gave birth to two classic navigation algorithms: the Asearch algorithm and the visibility graph method.
Although Shakey can only solve simple perception, motion planning and control problems, it is the most successful research platform for applying AI to robots at the time. It confirms many serious issues that are usually in the field of artificial intelligence (AI). Scientific conclusions. Since the end of the 1970s, with the development of computer applications and sensing technology, as well as the continuous introduction of new robot navigation algorithms, mobile robot research has begun to enter the fast lane.
An important sign of mobile robot intelligence is autonomous navigation, and there is a basic requirement for robot autonomous navigation - obstacle avoidance. Let us take a look at the obstacle avoidance of mobile robots. Obstacle avoidance refers to the mobile robots according to the state information of the obstacles collected, and when the sensors sense the static and dynamic objects that hinder their passage during the walking process, according to certain methods. Effectively avoid obstacles and finally reach the target point.
The necessary condition for obstacle avoidance and navigation is environmental awareness. In an unknown or partially unknown environment, obstacle avoidance needs to obtain information about surrounding environment through sensors, including the size, shape and position of obstacles. Therefore, sensor technology avoids mobile robots. The barrier plays a very important role. Sensors for obstacle avoidance mainly include ultrasonic sensors, visual sensors, infrared sensors, and laser sensors.
Common sensors for mobile robots to avoid obstacles
1, laser sensor
The laser ranging sensor uses a laser to measure parameters such as the distance to the measured object or the displacement of the measured object.
The more commonly used ranging method is to emit a pulse laser with a very short duration by a pulsed laser. After passing the distance to be measured, it is shot at the target to be measured, and the echo returns and is received by the photodetector. According to the interval between the main wave signal and the echo signal, that is, the round trip time between the laser pulse and the target to be measured, the distance of the target to be measured can be calculated.
Due to the fast speed of light, the beam round-trip time is extremely short when measuring small distances. Therefore, this method is not suitable for measurement (sub-millimeter) distances. Generally, if the accuracy is very high, triangulation, phase method, etc. are commonly used. Method measurement.

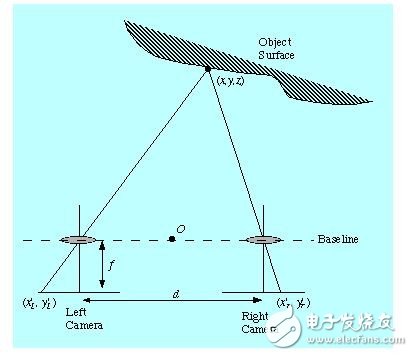
2, visual sensor
The advantage of the vision sensor is that it has a wide range of detection and rich information.
In practice, multiple vision sensors are often used or used in conjunction with other sensors. The shape, distance, speed, and other information of the object can be obtained by a certain algorithm. Or use a sequence image of a camera to calculate the distance and speed of the target. The SSD algorithm can also be used to calculate the relative displacement of the robot and the target based on the motion image of a lens.
However, in image processing, image processing methods such as edge sharpening and feature extraction have large computational complexity, poor real-time performance, and high requirements on the processor. Moreover, the visual ranging method can not detect the presence of transparent obstacles such as glass, and is also affected by the intensity of the field of view and the influence of smoke.
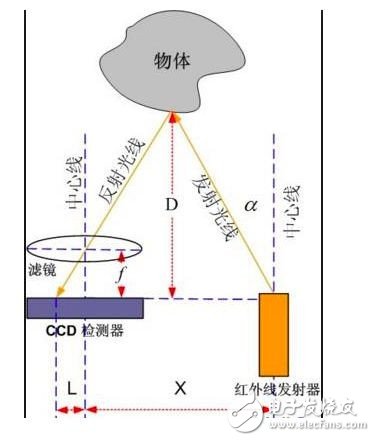
3, infrared sensor
Most infrared sensor ranging are based on triangulation.
The infrared emitter emits an infrared beam at a certain angle, and when it encounters an object, the beam is reflected back as shown. After the reflected infrared light is detected by the CCD detector, an offset value L is obtained. Using the triangular relationship, after knowing the emission angle α, the offset distance L, the central moment X, and the focal length f of the filter, the sensor The distance D to the object can be calculated from the geometric relationship.
The advantage of the infrared sensor is that it is not affected by visible light, and can be measured during day and night. The angle sensitivity is high, the structure is simple, the price is cheap, and the existence of the object can be quickly perceived, but the environment is greatly affected by the measurement, the color, direction, and surroundings of the object. The light can cause measurement errors and the measurement is not accurate enough.
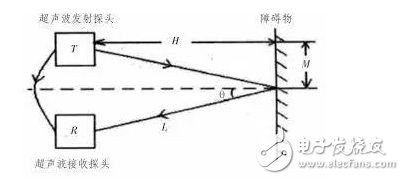
4, ultrasonic sensor
The principle of detecting the distance of the ultrasonic wave sensor is to measure the time difference between the ultrasonic wave and the detected ultrasonic wave, and calculate the distance of the object according to the sound speed. Since the speed of ultrasonic waves in air is related to temperature and humidity, changes in temperature and humidity and other factors need to be taken into account in more accurate measurements. Ultrasonic sensors generally have a short working distance, and the common effective detection distance is between 5-10 m, but there is a minimum detection dead zone, generally in the tens of millimeters. Due to the low cost of the ultrasonic sensor, the implementation method is simple and the technology is mature, and it is a commonly used sensor in mobile robots.
What are the robot obstacle avoidance algorithms?
At present, the obstacle avoidance of mobile robots can be divided into two types: the obstacle information is known, the obstacle information is unknown or completely unknown.
Traditional navigation obstacle avoidance methods such as view method, grid method, free space method and other algorithms can deal with the obstacle avoidance problem when the obstacle information is known, but when the obstacle information is unknown or the obstacle is movable, the traditional Navigation methods generally do not solve obstacle avoidance problems well or cannot avoid obstacles at all.
In actual life, in most cases, the environment in which the robot is located is dynamic, variable, and unknown. In order to solve the above problems, some algorithms in the fields of computer and artificial intelligence have been introduced. At the same time, thanks to the improvement of the computing power of the processor and the development of sensor technology, it is easy to perform some complex algorithms on the platform of the mobile robot. This has resulted in a series of intelligent obstacle avoidance methods. Algorithms, neural network algorithms, and fuzzy algorithms are introduced below.
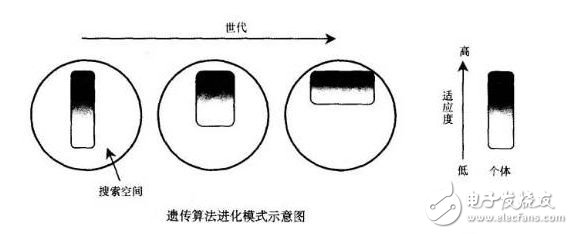
1. Robot obstacle avoidance algorithm based on genetic algorithm
The genetic algorithm (geneTIcalgorithm, referred to as GA) is a search algorithm used in computational mathematics to solve optimization, and is a kind of evolutionary algorithm. Evolutionary algorithms have been developed from the phenomena of genetics, mutation, natural selection, and hybridization in evolutionary biology. The genetic algorithm uses a few operators abstracted from natural evolution to genetically manipulate the parameter-encoded strings, including the ReproducTIonorSelect, Crossover, and MutaTIon.
The main advantage of the genetic algorithm is that it uses the group method to perform multi-cue parallel search on the objective function space without falling into local minimum points; it only needs to solve the value of the objective function without any other information, and the continuity of the objective function. The micro-feature is not required, and it is easy to use; the choice of the solution and the probabilistic method are generated, so it has strong adaptability and robustness.
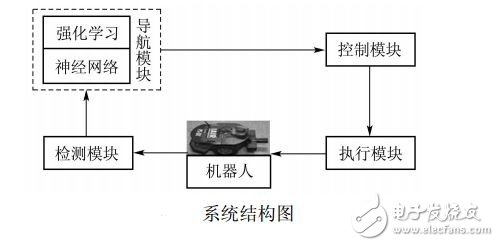
2. Robot obstacle avoidance method based on neural network algorithm
Neural network (NN) is a mathematical model or computational model that mimics the structure and function of a biological neural network. The neural network is calculated by a large number of artificial neuron connections. In most cases, an artificial neural network can change the internal structure based on external information, and is an adaptive system. Artificial neural networks are usually optimized by a mathematical statistical type-based learning method and are a non-linear statistical data modeling tool that models the complex relationships between input and output.
The traditional neural network path planning method is often to establish a neural network model about the robot's walking path from the initial position to the target position. The model input is the sensor information and the moving direction of the robot's previous position or the previous position. The direction of motion of the next or next position.
A robot neural network-based obstacle avoidance algorithm based on dynamic neural network can be established. The dynamic neural network can automatically adjust its structure according to the complexity of the robot's environmental state, realizing the mapping relationship between the robot's state and its obstacle avoidance action in real time, and effectively reducing the robot. The computational pressure. It is also possible to connect the hybrid intelligent system (HIS) while using the neural network to avoid obstacles, so that the cognitive decision-making ability of the mobile robot can be similar to that of people.
3. Robot obstacle avoidance algorithm based on fuzzy control
Fuzzy control (fuzzy control) is a kind of control method that applies fuzzy set theory. It does not simplify the actual situation like the classical control theory to establish a mathematical model, but carries out corresponding fuzzy logic reasoning through human experience and decision. The ambiguous language is used to describe the entire time-varying control process.
The mathematical model established for the classical control theory of mobile robot obstacle avoidance will be very rough, while the fuzzy control combines the simplified parts of the classical control.
For the fuzzy control of obstacle avoidance of mobile robots, the key problem is to establish a suitable fuzzy controller. The fuzzy controller mainly completes the fuzzy value of the obstacle distance value, the operation of the obstacle avoidance fuzzy relation, the fuzzy decision and the obstacle avoidance decision result. Important processes such as non-fuzzification (accuracy) to intelligently control the obstacle avoidance behavior of mobile robots. The fuzzy control theory can also directly translate the language rules formed by expert knowledge or operator experience into automatic control strategies. The fuzzy rule lookup table is usually used to design and modify the control algorithm using the language knowledge model.

In addition, heuristic search algorithms, behavior-based path planning algorithms, path planning algorithms based on re-energized learning, and other obstacle avoidance algorithms have also achieved good results in the obstacle avoidance research of mobile robots.
Outlook
With the development of computer technology, sensor technology and artificial intelligence, the obstacle avoidance and autonomous navigation technology of mobile machines have achieved fruitful research results, and the application fields are constantly expanding, and the application complexity is also increasing. The independent pathfinding requirements of mobile robots have been upgraded from simple functions to reliability, versatility and high efficiency, so they have higher requirements for their related technologies.

However, no method has been used to effectively avoid obstacles in any environment. How to overcome the limitations of related algorithms is one of the research directions in the future. It can be seen that both traditional algorithms and emerging intelligent algorithms have their applicable and inapplicable environments. Through the fusion of traditional algorithms and intelligent algorithms and intelligent algorithms, the shortcomings of individual algorithms are overcome and the overall applicability is enhanced. There have been a lot of researches in this area, and it will still be one of the research hotspots in the future.
Pvc Bar Mat,Pvc Bar Spill Mat,Logo Bar Mat,Pvc Barmat
Cixi Mingsheng Rubber & Plastic Co.,Ltd. , https://www.cixidoormats.com