基于嵌入å¼DSP在家电电机控制器ä¸çš„应用
  一ã€æ¦‚è¿°
  DSP擅长于数å¦è¿ç®—,嵌入å¼DSP电机控制芯片把DSPå†…æ ¸ä¸Žä¸€ç³»åˆ—åŠŸèƒ½å¼ºå¤§çš„æŽ§åˆ¶å¤–è®¾é›†æˆåˆ°ä¸€ä¸ªèŠ¯ç‰‡ä¸Šï¼Œè¿™æ ·ä¾¿èƒ½ä»¥å¿«é€Ÿçš„DSPå†…æ ¸ä½œä¸ºè®¡ç®—å¼•æ“Žï¼ŒåŠ ä¸Šç‰‡å†…çš„A/D模å—æ高了电机控制带宽,并且å…许低æˆæœ¬å®žçŽ°æ›´åŠ å¤æ‚åž¢æŽ§åˆ¶å’Œæ— ä¼ æ„Ÿå™¨çš„ç®—æ³•ï¼Œå› æ¤èƒ½æŽ§åˆ¶äº¤æµæ„Ÿåº”电动机ã€æ— 刷直æµç”µåŠ¨æœºå’Œå¼€å…³ç£é˜»ç”µæœºï¼Œéœ€ä¸éœ€è¦é€Ÿåº¦æˆ–ä½ç½®ä¼ 感器,甚至特殊的电æµä¼ æ„Ÿæ–¹å¼ã€‚这些计算能力和优化的外设使它很容易的完æˆæ›´å¤šçš„åŠŸèƒ½ï¼Œå¦‚åŠŸçŽ‡å› æ•°çš„æ ¡æ£ï¼›åœ¨ä¸å¢žåŠ 控制器æˆæœ¬çš„情况下,满足æŸäº›ç‰¹æ®Šåº”用的è¦æ±‚,如洗衣机的平衡控制。
  新ç»æµŽå°†æˆ‘们带进一个全数å—的世界,更多的数å—ä¿¡æ¯å°†è¦æ¶Œå…¥å®¶åºï¼Œå¦‚网络冰箱就是é‡ä¾‹ã€‚嵌入å¼DSP使控制器甚至是电器之间建立通信æˆä¸ºæ˜“事。最新的嵌入å¼DSP带调试用的JTAG和为家åºç½‘络控制用的CAN总线。DSP计算引擎将与更先进的外设集æˆï¼Œæ供一ç§å•ç‰‡è§£å†³æ–¹æ¡ˆã€‚å› æ¤ä¼˜åŒ–的外设是å¯ç¼–程的,并且处于软件的实时控制之下,所以嵌入å¼DSPå¯æä¾›æ›´åŠ çµæ´»å¤šæ ·çš„控制特å¾ï¼Œä¸”易于å‡çº§ã€‚
  本文将从嵌入å¼DSP电机控制芯片的基本特å¾å¼€å§‹ï¼Œä»‹ç»ä¸€ä¸‹åŸºäºŽDSPçš„ç£åœºå®šå‘控制和扩展å¡å°”曼滤波算法。
  二ã€åµŒå…¥å¼DSP电机控制芯片
  ä¸åŒçš„厂商,他们的DSP电机控制芯片在DSPå†…æ ¸ã€å¤–设ã€ç¼–程è¯è¨€ä»¥åŠå…¶ä»–åŠå¯¼ä½“技术ä¸å‡æœ‰ä¸åŒã€‚先进的DSPå†…æ ¸ä¸Žä¼˜åŒ–çš„å¤–è®¾ç»“åˆï¼Œä¸ä»…å¯ç”¨äºŽç”µæœºæŽ§åˆ¶ï¼Œä¹Ÿå¯ä»¥ç”¨äºŽé€šä¿¡å’Œå…¶ä»–功率电å控制。由于æ¯ä¸ªåº”用之间在外设方é¢ç›¸å·®å¾ˆå¤§ã€‚为所有的应用设计一个嵌入å¼çš„电机控制芯片是ä¸ç»æµŽçš„,也是ä¸çŽ°å®žçš„。通常,都会有一系列产å“为ä¸åŒçš„应用而优化。外设至少应包括3~6相16ä½PWM产生器ã€å¤šé‡è¾…助PWM计数器ã€æ¨¡æ‹Ÿé‡é‡‡é›†ç³»ç»Ÿã€å‚考电压ã€ä¸²è¡Œé€šä¿¡å£ã€é€šç”¨I/Oå£ï¼Œå¦å¤–也å¯ä»¥åŒ…括编程器接å£ã€CAN总线和JTAG接å£ã€DMA控制器ã€DPIå£ç‰ç‰ã€‚
  一些嵌入å¼DSP具有片内Flashå˜å‚¨å™¨ï¼Œå¦‚ADIçš„DashDSP系列。在产å“å¼€å‘çš„ä¸åŒé˜¶æ®µå¯ä»¥å¾ˆæ–¹ä¾¿åœ°é€šè¿‡PC与DSP的通信æ¥ä¿®æ”¹è½¯ä»¶ï¼Œä»Žè€Œæ–¹ä¾¿åœ°è¿›è¡Œå¯é‡å¤ç¼–程。Flashå˜å‚¨å™¨çš„软件å¯ä»¥ç§»æ¤åˆ°åŸºäºŽROM的产å“æ¥å¤§æ‰¹é‡ç”Ÿäº§ã€‚
  PWM模å—æ供了çµæ´»å¯ç¼–程的多相PWM波形,å¯ç”¨æ¥é©±åŠ¨äº¤æµæ„Ÿåº”电动机ã€æ— 刷直æµç”µåŠ¨æœºæˆ–开关ç£é˜»ç”µåŠ¨æœºã€‚辅助PWM输出å¯ç”¨æ¥æä¾›å‰ç«¯çš„åŠŸçŽ‡å› æ•°æ ¡æ£æˆ–开关电æºæŽ§åˆ¶ã€‚å¦å¤–,通过适当的滤波网络,也å¯ä»¥ç”¨ä½œç®€å•çš„A/D转æ¢ã€‚
  嵌入å¼DSP电机控制芯片使用å•ç§¯åˆ†å¼ã€æ€»å’Œå¢žé‡å¼æˆ–æµæ°´é—ªé€ŸæŠ€æœ¯çš„A/D系统。它的多通é“模拟é‡é‡‡æ ·ç³»ç»Ÿé€šå¸¸æœ‰10~12ä½çš„分辨率,与ä¸åŒåº”用所选的ä¸åŒåž‹å·æœ‰å…³ç³»ã€‚
  三ã€é‡‡ç”¨æ‰©å±•å¡å°”æ›¼é¢„æµ‹ç®—æ³•çš„æ— åˆ·ç›´æµç”µåŠ¨æœºæ— ä¼ æ„Ÿå™¨æŽ§åˆ¶
  相对于交æµæ„Ÿåº”ç”µåŠ¨æœºï¼Œæ— åˆ·ç›´æµç”µåŠ¨æœºç”±äºŽå…¶ç‰¹æ€§æ›´æŽ¥è¿‘于有刷直æµç”µåŠ¨æœºè€Œå…·æœ‰å¤šæ–¹é¢çš„优势;åŒæ—¶ä¹Ÿç”±äºŽæ— 刷直æµç”µåŠ¨æœºå¤§éƒ½é‡‡ç”¨äº†æ°¸ç£è½¬åï¼Œå…·æœ‰æ›´é«˜çš„æ•ˆçŽ‡ï¼Œå› æ¤ç‰¹æ€§é€‚åˆäºŽå®¶ç”¨ç”µå™¨ã€‚它本身生æ¥å…·æœ‰æ—‹è½¬å¹³ç¨³ã€å™ªå£°ä½Žç”µæœºå°ºå¯¸å°ç‰æ˜¾è‘—特点,也使使其得到了许多家用电器厂家的é’ç,在风扇ã€æ´—衣机ã€å†°ç®±åŠç©ºè°ƒåŽ‹ç¼©æœºä¸ï¼Œéƒ½å¼€å§‹é‡‡ç”¨æ— 刷直æµå°½å¯èƒ½åŠ¨æœºã€‚
ã€€ã€€æ— åˆ·ç›´æµç”µåŠ¨æœºçš„控制有别于有刷直æµç”µåŠ¨æœºæˆ–交æµæ„Ÿåº”电机,它需è¦ä¸€äº›ä½ç½®ä¼ æ„Ÿä¿¡æ¯æ¥é€‰æ‹©æ£ç¡®çš„æ¢æµé¡ºåºï¼Œè€Œå®¶ç”µäº§å“对费用的æ•æ„Ÿï¼Œä½¿å¾—å¢žåŠ ä¼ æ„Ÿéƒ¨ä»¶æ‰€å¸¦æ¥çš„é¢å¤–费用ä¸å—接å—,也ä¸åˆ‡å®žé™…ï¼›åŒæ—¶å®¹æ˜“é™ä½Žç³»ç»Ÿçš„å¯é 性,而且对于象压缩机一类密å°çš„æ— åˆ·ç›´æµç”µåŠ¨æœºï¼Œå®‰è£…ä½ç½®ä¼ 感器是éžå¸¸ä¸çŽ°å®žçš„,也是ä¸å…许的。在这ç§æƒ…å†µä¸‹ï¼Œæ— åˆ·ç›´æµç”µåŠ¨æœºçš„æ— ä¼ æ„Ÿå™¨æŽ§åˆ¶å°†è¢«å¹¿æ³›é‡‡ç”¨ï¼Œä½¿ä¹‹åœ¨å®¶ç”µé¢†åŸŸé“–ä¸ºä¸€ä¸ªçƒé—¨è¯é¢˜ã€‚
  有多ç§ç®—法å¯ä»¥å®žçŽ°æ— ä¼ æ„Ÿå™¨æŽ§åˆ¶ï¼Œä¼ ç»Ÿçš„æ–¹æ³•ï¼ˆè¿‡é›¶æ£€æµ‹æ³•ï¼‰å¤§éƒ½é‡‡ç”¨æ£€æµ‹ä¸å¯¼é€šç›¸å电势的过零点判æ–转åçš„ä½ç½®ï¼Œæ ¹æ®è¿‡é›¶ç‚¹ä¿¡æ¯åŠæ¢ç›¸é€»è¾‘æ¥é€‰æ‹©æœ€ä½³çš„æ¢æµé¡ºåºã€‚这些方法已ç»åœ¨è®¸å¤šå®¶ç”µä¸Šé‡‡ç”¨ï¼Œå¦‚ç›´æµå˜é¢‘冰箱åŠç›´æµå˜é¢‘空调。但由于过零检测法åªèƒ½æ£€æµ‹ä¸€äº›ç‰¹å®šçš„点,而且éšç€ç”µæœºè½¬é€Ÿåœ¨å¤§èŒƒå›´å†…å˜åŒ–,å电势的å˜é¢‘率也会å˜åŒ–,检测电路ä¸çš„滤波器件会带æ¥ä¸€å®šçš„相移,这会大大影å“检测过零点的准确性;åŒæ—¶ç”±äºŽåŠŸçŽ‡å™¨ä»¶ä¸Šç»æµäºŒæžç®¡çš„åå‘电æµä½œç”¨ï¼Œåœ¨å¤§ç”µæµæƒ…况下也会对过零点的检测带æ¥ä¸€å®šçš„å½±å“。
  针对这些问题,采用扩展å¡å°”曼预测算法æ¥ä¼°ç®—æ— åˆ·ç›´æµç”µåŠ¨æœºè½¬å的瞬时ä½ç½®ä¸Žé€Ÿåº¦ä¿¡æ¯ï¼Œä¸ºæ— 刷直æµç”µåŠ¨æœºæ— ä¼ æ„Ÿå™¨æŽ§åˆ¶æ供了一ç§è¾ƒå¥½çš„解决方法。而且采用美国ADI的嵌入å¼DSP电机控制器,åªéœ€è¦ä¸€ç‰‡28è„šçš„ADMC328å³å¯å¾ˆæ–¹ä¾¿åœ°å®žçŽ°è¯¥ç®—法。
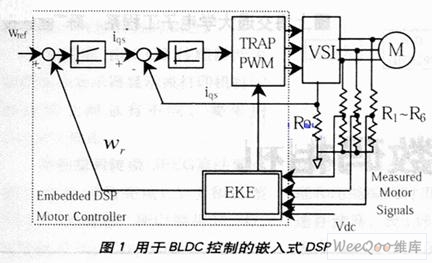
  图1表示了用扩展å¡å°”曼预测算法(简称EKEï¼‰ä¼°ç®—æ— åˆ·ç›´æµç”µåŠ¨æœºè½¬å角度(ä½ç½®ï¼‰å’Œé€Ÿåº¦çš„原ç†æ¡†å›¾ï¼Œå›¾ä¸è™šçº¿æ¡†å†…å³ä¸ºä¸€ç‰‡åµŒå…¥å¼DSP电机控制器,三对电阻网络用于测é‡éžå¯¼é€šç›¸çš„å电势信å·ï¼Œå¹¶å°†è¯¥ä¿¡å·é€åˆ°åµŒå…¥å¼DSP电机控制器的ADC端。从图ä¸å¯çœ‹å‡ºè¯¥æ–¹æ³•é‡‡ç”¨äº†åŒé—环控制,用EKE算法估算出电机转å速度,对外环é—环,实现速度环控制。åŒæ—¶è¿˜èƒ½ä¼°ç®—出转åä½ç½®ï¼Œå®žçŽ°æ— ä¼ æ„Ÿå™¨æ¢ç›¸ï¼Œè€Œå®Œå…¨ä¸ä¾èµ–于过零点检测。在直æµæ¯çº¿ä¸Šå¯ç”¨ä¸€ä¸ªé‡‡æ ·ç”µé˜»æ¥æµ‹é‡å¯¼é€šç›¸çš„电æµï¼Œä½œä¸ºå†…环å馈以实现电æµï¼ˆåŠ›çŸ©ï¼‰æŽ§åˆ¶ã€‚
  在DSPä¸è¿›è¡Œé€’推处ç†æ—¶ï¼ŒEKE算法便转å速度和ä½ç½®çš„ä¼°ç®—å˜æˆå电势噪声输入,它包括两æ¥ï¼šç¬¬ä¸€æ¥æ˜¯ç”¨çŠ¶æ€é‡å’ŒåŸºäºŽå‰ä¸€çŠ¶æ€é‡è¾“出进行预估算;第二æ¥æ˜¯å®Œæˆæ ¡æ£è¿‡ç¨‹ï¼Œè¿ç”¨å电势测é‡æ•°æ®å’Œè§‚测器模型去优化修æ£å‰é¢ä¼°ç®—的状æ€é‡ã€‚
  è¦å®ŒæˆEKE算法,首先需建立一个连ç»çš„时域系统模型。在本应用ä¸ï¼Œçº¿æ€§ç³»ç»Ÿæ¨¡åž‹å¯ç”¨æ–¹ç¨‹ï¼ˆ1)æ述:
  X=Fx+Gu(1)
  å¯å°†è¿žç»çš„时域系统模型转æ¢æˆç¦»æ•£åŸŸçº¿æ€§ç³»ç»Ÿæ¨¡åž‹ï¼Œé€šè¿‡å¯¹è¿žç»çš„时域系统模型按相当于PWM频率2å€çš„é‡‡æ ·é¢‘çŽ‡é‡‡æ ·ï¼Œå¾—åˆ°ç¦»æ•£åŸŸç³»ç»Ÿæ¨¡åž‹ï¼š
  X(k+1)=φkXk+Γkuk+σk(2)
  这里,状æ€å‘é‡å…¶ä¸Ï‰kã€Ïƒk是系统所包å«çš„代表转å速率和角度(ä½ç½®ï¼‰çš„两维离散状æ€å˜é‡ï¼›uk是转矩信å·ï¼Œå¯ä¸ºç¡®å®šæ€§è¾“入;系统éšæœºå¹²æ‰°ï¼ˆæ¨¡åž‹å™ªå£°ï¼‰Ïƒk是零å‡å€¼ç™½è‰²é«˜æ–¯å™ªå£°ï¼Œå®šä¹‰å…¶å方差阵为。
  在该应用ä¸ï¼Œåªæœ‰è§‚测器模型是éžçº¿æ€§çš„,它å¯æ述如下:
  Zk=hkXk+Vk  (3)
  这里hk是一个éžçº¿æ€§å‡½æ•°ï¼Œå®ƒåº”该是关于ä¸å¯¼é€šç›¸çš„å电势的最近似的关系å¼ï¼Œæ¶‰åŠè½¬åä½ç½®å’Œé€Ÿåº¦â€”—系统的状æ€å˜é‡ã€‚测é‡å™ªå£°æ˜¯é›¶å‡å€¼ç™½è‰²é«˜æ–¯å™ªå£°ï¼Œå®šä¹‰å…¶å方差阵为Rk。
  在EKEä¸ï¼Œéžçº¿æ€§è§‚测器模型å¯åœ¨æœ€æ–°çŠ¶æ€é¢„测点线性化。éžçº¿æ€§å‡½æ•°å¦‚果足够平滑,å¯åœ¨æœ€æ–°çŠ¶æ€ç‚¹ä¸Šå±•å¼€æˆæ³°å‹’级数,这就ä¿è¯äº†å¯¹è§‚测器模型而言,现有的线性近似是最好的近似,所选å–的轨迹也是最新近的轨迹。该函数的确定,对于EKE算法能å¦å¾—到æ£ç¡®çš„预测起到了关键作用。
  用方程(2)对状æ€é‡è¿›è¡Œé¢„先状æ€ä¼°ç®—,通过忽略模型噪声,然åŽå°†é¢„å…ˆä¼°ç®—å€¼åŠ ä¸Šç”¨å¡å°”曼增益KkåŠ æƒè¿›è¡Œä¿®æ£çš„测é‡æ®‹å·®æ¥å¾—到预测值,这å¯è¡¨ç¤ºå¦‚下:
  xk=xk+Kk(zk-zk -)(4)
  为了在(4)ä¸å¾—到最优估计,采用如下å¡å°”曼增益:
  Kk=Pk -HkT(HkT+Rk) -1(5)
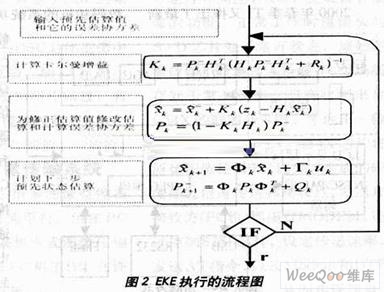
  整个递推过程å¯ç”±å›¾2所示垢æµç¨‹å›¾æ¥æ述,显然对转å速度和角度估算的EKE实际上是一个DSP算法,由DSP把å电势的离散测é‡å€¼å¤„ç†æˆè½¬å速度和角度的最优估算,它å¯ä»¥æŒ‰çº¿æ€§è½¨è¿¹è¿›è¡Œçº¿æ€§åŒ–。递推过程用最优估算值Xk作为xçš„tk时刻的å‚考值去预测(xk+1)-ã€‚å› æ¤å®ƒå®žé™…上是一个近似最优的滤波器件设计,常称为次最优滤波。EKE算法的执行包å«äº†å¤§é‡çš„矩阵è¿ç®—,它å¯ä»¥ç”¨åµŒå…¥å¼DSP电机控制器方便地进行处ç†ã€‚
 Â
å‚考文献:
[1]. ROM datasheet http://
[2]. ADMC328 datasheet http://
[3]. EKE datasheet http://
:
Non-shrink Terminal,Power Distribution Block ,Fused Terminal Block ,Power Terminal Block
Rubber Tube, Pipe & Hose Co., Ltd. , http://www.nbflexibletube.com