Can the iPhone 3D Touch be implemented on both the front and the back of the iPhone?
According to the report of the James, an Apple patent application released on September 21 confirmed that Apple continues to focus on advanced force sensing technology, called "3D Touch." According to Apple, this new back-sensing structure can help the body thin.

In the Detecting backside force in a touch-screen device issued by the US Patent and Trademark Office, a method of integrating a calibration force sensor is described in detail, which can detect the user on the back of the device. input of. When detecting the external force input on the back of the device, the integrated back of the sensor can also measure the potential stress during normal use, which may result in inaccurate front readings. Such a configuration can achieve a very thin body design, resulting in bending under a hard pressing operation. Today's most advanced technologies, such as 3D Touch, integrate a force-sensing layer close to or under the smartphone screen or under the protective glass. Apple's current solution is to detect changes in force by measuring and plotting small changes in capacitance between the glass screen of the iPhone and the rigid metal sensor layer in the built-in backlight. In 3D Touch, an independent multi-touch capacitive sensor located above the screen of the phone completes multiple tasks by confirming the position of the finger. The main operational component to complete this system is the haptic feedback module called the Taptic Engine.
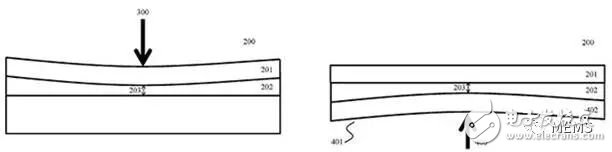
As Apple pointed out in the patent, the user may inadvertently cause the fuselage to bend or otherwise exert excessive pressure on the back of the phone when pressed, resulting in deformation of the phone. If the user is strong enough or the body is thin enough, this deformation may propagate to the force sensor, resulting in false or false readings. To prevent this, manufacturers use harder or thicker materials for the phone body. These solutions may increase unnecessary volume, increase manufacturing costs, and limit the normal operation of the rear sensing device. In fact, the essence of this patent is to detect externally applied forces through the internal components of the device. On the contrary, the patent proposes to reserve enough space for force calibration without increasing the hardness of the outer casing of the mobile phone, or even reducing the hardness. The touch sensor can draw an accurate distribution of the external force on the back of the fuselage. In some cases, the force sensor is also calibrated for use in internal battery and logic board applications.
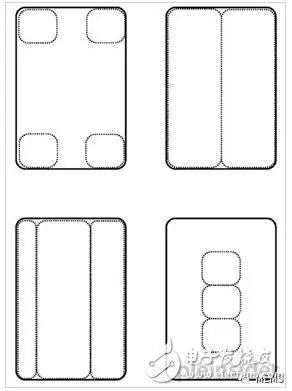
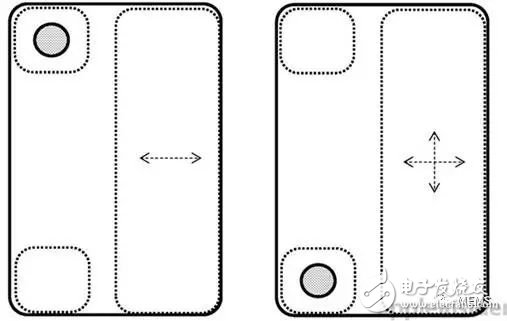
The potential external force sensing area on the back of the fuselage is designed to detect non-local changes in capacitance because the force or strain sensor is designed to distinguish between forces applied to the top, bottom or sides of the device. Thus, like current 3D Touch iterations, the system correlates force and haptic data to achieve a highly localized response associated with the front input of the handset. It is speculated that this technique can be used to track unrelated actions that result in changes in the back force. Specifically, the external force and touch measurement can be matched to determine whether the user's intention is to the front or the back of the fuselage. This is done by confirming the location and strength of the applied external force. If the external force contact distance applied on the back side is within a predetermined threshold distance, it is considered to be an external force input on the front side of the fuselage. Conversely, if the touch and force readings are not correlated, it is likely that the external force is from the back of the fuselage. The patent describes the solution in detail and details how to ensure that the system accurately understands the user's intentions. Based on limited information, the proposed solution can choose to ignore the external force input on the back or trigger a large number of presses on the back. Since the system does not have a rear touch sensor, it cannot be as sensitive as 3D Touch, which means that it is limited to a large area or a specific "area" external force input. Even so, the patented backside force input provides at least a choice of more or additional 3D Touch modes, whether or not this is limited to only one-half, one-quarter or even a small area on the back of the phone. operating. In addition, back-sensing can support mobile gesture applications, such as swiping cards, and it is expected to generate a series of more complex control schemes in the future.
Whether Apple will adopt back-force sensing technology in the future iPhone is still unknown. But the iPhone 6s can be considered an exploratory application stage for 3D Touch. In the current iOS version, 3D Touch provides some force-sensitive controls, including Peek and Pop, which provide different software responses through different finger press forces. For example, by gently pressing the screen, you can open the hyperlink, or open a new Safari window to let the user "peek" the contents inside; or press hard, the floating window becomes a full-screen view. Many first-party and third-party applications take advantage of this technology, and users have slowly accepted the "next-generation multi-touch" technology that Apple has advertised. But this will change with iPhone X, because iPhone X cancels the Home button that was heavily relied on in the past. The inventors of Apple's new patent are Golnaz Abdollahian and Wayne C. Westerman. The first application was in March 2017.
Dc Relay,Dc Power Relay,Condenser Contactor,Voltage Protection Relay
NanJing QUANNING electric Co.,Ltd , https://www.quanningtrading.com